 The indoor flight arena consists in a 13 ft ×20 ft ×8 ft flight volume delimited by a safety net housed in 380 ft2 of space and is comprised of the following parts:
The indoor flight arena consists in a 13 ft ×20 ft ×8 ft flight volume delimited by a safety net housed in 380 ft2 of space and is comprised of the following parts:
Platforms:
i) ANT-X drones: three small (7.8 ×7.8 ×1.5 in), lightweight (0.6 lb), agile and robust quadcopters;
ii) ROG-X drone: one coaxial quadrotor (19.6 ×14.5 × 7.8 in, 7 lb) to be employed for activities on autonomous guidance and navigation based on computer vision;
iii) crazyflies: nanoquadcopters
Ground control station:
A desktop PC is used as a ground control station (GCS) to connect to the drones via Wi-Fi, get telemetry data from the motion capture system, send commands and setpoints to the drones, and log data collected in flight. It is possible to connect to multiple drones simultaneously.
Motion capture system:
A motion capture system tracks the drones during indoor flight, measures their position and orientation with high accuracy, supports the operation of navigation and control systems and evaluates the drone’s performance. The flight volume is mapped by thirteen cameras.
1 DoF testbed:
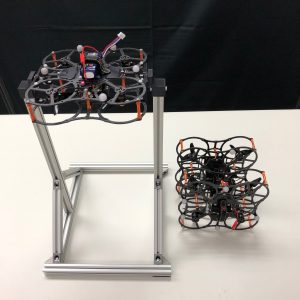
1DOF testbed and quadcopters
The 1 DoF testbed consists in a drone constrained to a structure by means of rotational ball bearings, allowing therefore the rotation about the pitch axis, such that only one rotational degree of freedom is retained. The 1 DoF testbed can be used to study the angular dynamics of the drone; to carry out identification experiments in order to characterize the angular dynamics of the drone; to design and experimentally validate attitude and angular rate controllers.
2 DoF testbed:
The structure of the testbed is made up of an aluminum frame and two steel bars which constrain the translational motion of a ANT-X based drone through a cart with linear ball bearings. There are two operational modes for the testbed: (a) attitude mode (1 DoF) – by constraining the linear displacement DoF through removable mechanical constraints, the drone is free to rotate about the pitch axis alone; (b) position mode (2 DoFs) – in this operating mode, the drone is left free to move along the bars, giving two DoFs (translation and rotation);
Software architecture:
The software architecture of the flight arena is distributed across several hardware components:
- Ground Control Station (GCS): It is used for sending setpoint commands; receiving onboard estimates/measurements; sending excitation signals (e.g., to carry out identification experiments, or validation of controller performance).

2DoF testbed
- Flight Control Unit (FCU): it runs the open-source PX4 firmware on top of a RTOS (Real Time Operating System) onboard the drone. The FCU is meant to run low-level functionality, such as the controller, the estimators, and the sensor modules. It is equipped with an IMU measuring accelerations and angular rates at high frequency. The firmware is customizable by the user; specifically, the user has the possibility to customize the controller at very low level, interfacing directly to the control actions of the single motors.
- Flight Companion Computer (FCC): onboard the drone, it runs a Linux distribution, and provides communication to the GCS via Wi-Fi and to the FCU via serial communication.
 Communication and logging:
Communication and logging:
The software architecture exploits the communication capabilities provided by the ROS infrastructure. Communication between the FCU and the FCC occurs over serial connection, using the MAVLink open-source protocol and a MAVROS node. Communication between the GCS and the drone occurs via Wi-Fi; the FCC onboard the drone is connected to a Wi-Fi network by means of a router/access point. The GCS is connected to the same network. All the drones are connected to the same network, and the GCS acts as a central node. Flight data are logged directly on the ground control station, exploiting the ROS infrastructure, and are made available to the user in MATLAB format for easy processing.
Crazyflies 2.1:
Versatile open source flying development platform equipped with low-latency/long-range radio (Crazyradio) as well  as Bluetooth LE, an onboard microcontroller, 3 axis accelerometer/ gyroscope, high precision pressure sensor, and customizable expansion decks for additional functionality. Either official manufacturer’s decks can be used or custom ones can be designed using the provided KiCad template. The platform’s weight is 0.06 lb, with maximum recommended payload weight 0.03 lb. In our lab, telemetry data can be obtained either via the Optitrack system or via the Lighthouse positioning system which uses the SteamVR Base stations of Valve Inc. and the Lighthouse deck on the Crazyflie; Log data include measurements, estimates and control actions collected onboard the drone and transmitted to the GCS.
as Bluetooth LE, an onboard microcontroller, 3 axis accelerometer/ gyroscope, high precision pressure sensor, and customizable expansion decks for additional functionality. Either official manufacturer’s decks can be used or custom ones can be designed using the provided KiCad template. The platform’s weight is 0.06 lb, with maximum recommended payload weight 0.03 lb. In our lab, telemetry data can be obtained either via the Optitrack system or via the Lighthouse positioning system which uses the SteamVR Base stations of Valve Inc. and the Lighthouse deck on the Crazyflie; Log data include measurements, estimates and control actions collected onboard the drone and transmitted to the GCS.
TurtleBot 4 Standard:
Two open source ground robot platforms equipped with a mobile base providing an array of intelligent sensors for accurate localization and positioning and a powerful Raspberry Pi 4B running ROS 2. Onboard sensors include the OAK-D spatial AI stereo camera, 2D Lidar, IMU, optical floor tracking sensor, wheel encoders, infrared, cliff, bump, slip detection. All onboard sensors are available as ROS topics via the network-connected ROS 2 API. Custom sensors and payloads can be easily added, expanding the capabilities of TurtleBot 4 platform.
Windshaper:
Multi-fan wind generator (1.7 x 1.7 ft), comprised of 4 wind modules, in a 2×2 configuration, i.e., 2 modules along the x-axis and y-axis, respectively. Each wind module is composed of nine wind-pixels of 2 fans each, for a total of 18 fans per module. Minimum and maximum flow speed are 2 m/s and 16 m/s, respectively, with maximum flow rate 3.8 m3/s.

TurtleBot

Windshaper
Head to our YouTube channel to see some research from the lab!